![]()
Regularized Deep Signed Distance Fields for Reactive Motion Generation
Puze Liu, Kuo Zhang, Davide Tateo, Snehal Jauhri, Jan Peters, and
Georgia Chalvatzaki
Techinal University Darmstadt
Robots in Factory
Robot in Daily Life
Robot in Daily Life
- Safety
- Unstructured Environments
- Delicate Manipulation
- Dynamical Human Behavior
Robot in Daily Life
- Safety
- Unstructured Environments
- Delicate Manipulation
- Dynamical Human Behavior
How can we achieve dexterous
manipulation tasks in dynamic
environment without
collisions?
ReDSDF: A Regularized
Deep Signed Distance Field
- Fast Computation
- Handle Complex Geometries
- Precise Local Representation
- Good Extroplating Ability
- Articulated Objects
ReDSDF: A Regularized
Deep Signed Distance Field
- Fast Computation
- Handle Complex Geometries
- Precise Local Representation
- Good Extroplating Ability
- Articulated Objects
$$ d(\vx, \textcolor{darksalmon}{\vq}) = \left[1-\sigma_{\vtheta}(\vx,
\textcolor{darksalmon}{\vq})\right]\textcolor{YellowGreen}{\underbrace{f_{\vtheta}(\vx,
\vq)}_{\mathrm{NN}}} +
\sigma_{\vtheta}(\vx, \textcolor{darksalmon}{\vq})\textcolor{orange}{\underbrace{\lVert \vx - \vx_c
\rVert_2}_{\mathrm{Point\,Dist.}}}$$
ReDSDF: A Regularized
Deep Signed Distance Field
$$ d(\vx, \textcolor{darksalmon}{\vq}) = \left[1-\sigma_{\vtheta}(\vx,
\textcolor{darksalmon}{\vq})\right]\textcolor{YellowGreen}{\underbrace{f_{\vtheta}(\vx,
\vq)}_{\mathrm{NN}}} +
\sigma_{\vtheta}(\vx, \textcolor{darksalmon}{\vq})\textcolor{orange}{\underbrace{\lVert \vx - \vx_c
\rVert_2}_{\mathrm{Point\,Dist.}}}$$
$
\sigma_{\vtheta}(\vx, \textcolor{darksalmon}{\vq}) =
\sigmoid\left(\textcolor{OrangeRed}{\alpha_{\vtheta}}\left( \lVert\vx -
\vx_c\rVert_2 - \textcolor{OrangeRed}{\rho_{\vtheta}} \right)\right)
$
![]()
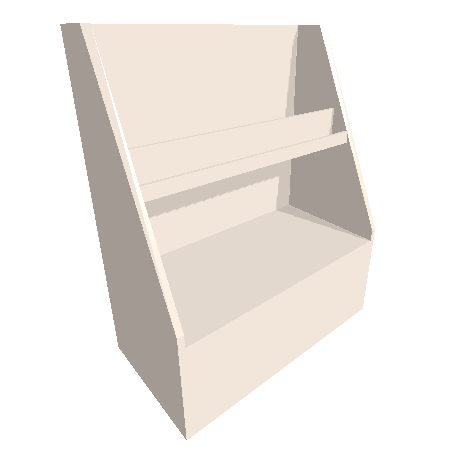
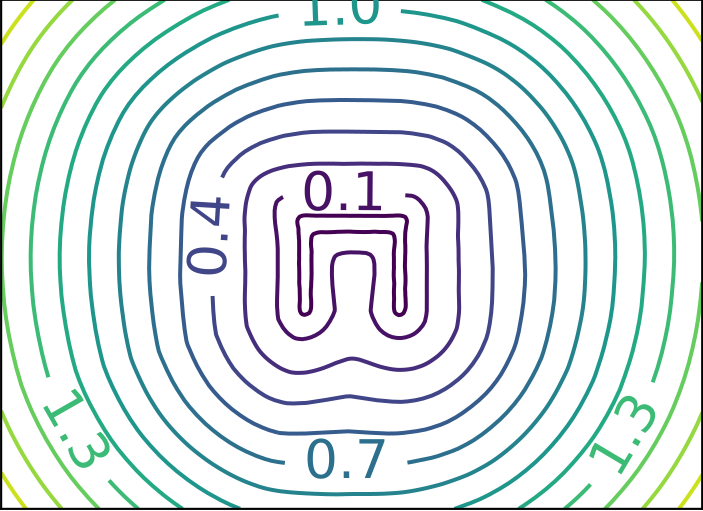
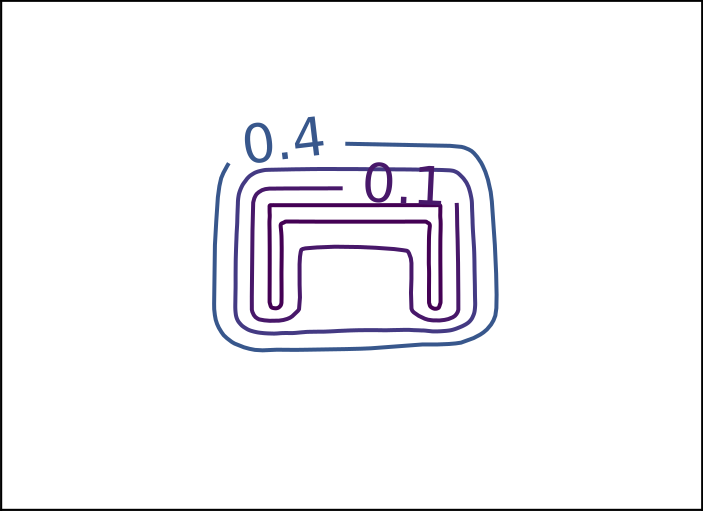
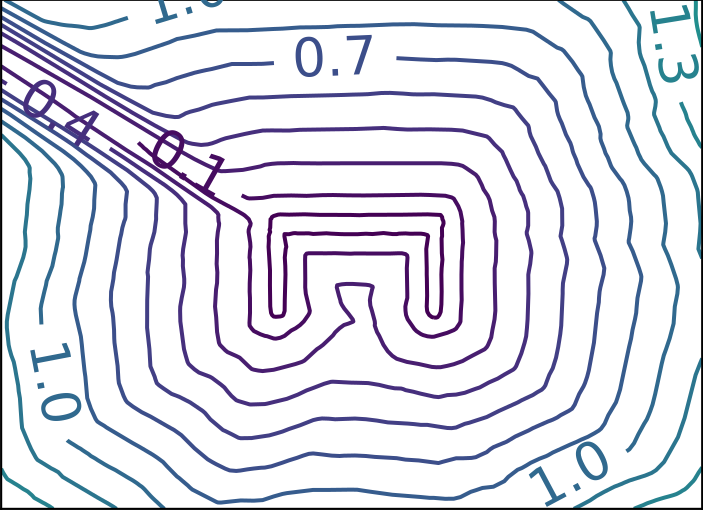
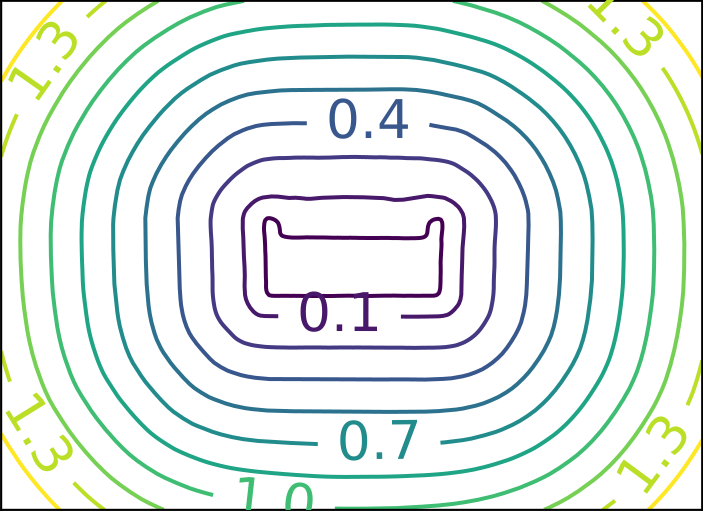
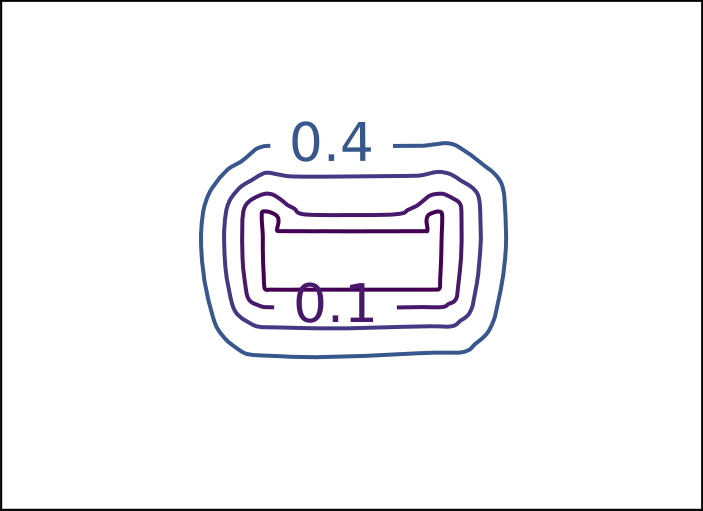
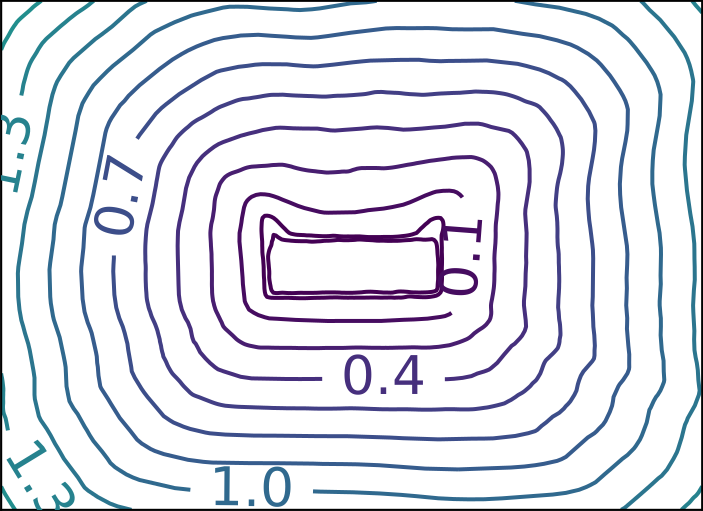
ReDSDF: Surface Reconstruction
![]()
Table
![]()
Shelf
ReDSDF: Surface Reconstruction
ReDSDF: Global Reconstruction
Reactive Motion Generation: Bi-Manipulation
Reactive Controller: Artifical Potential Field
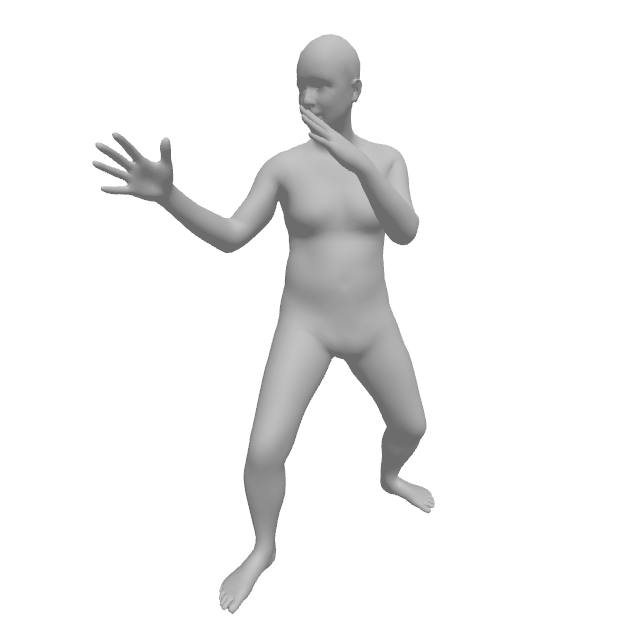
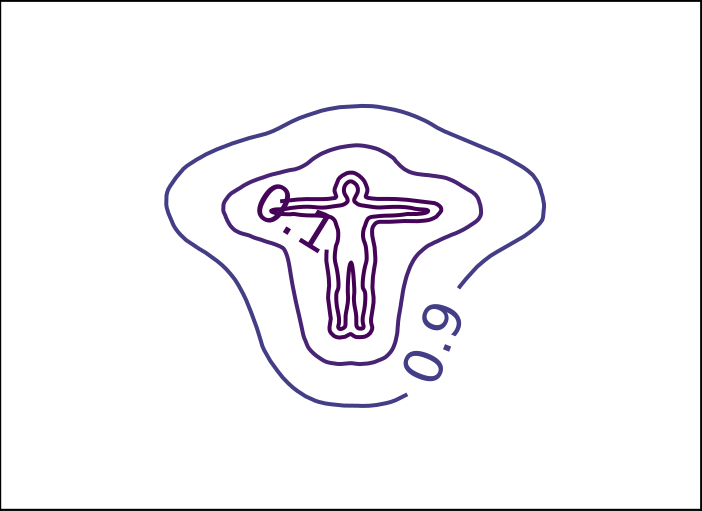
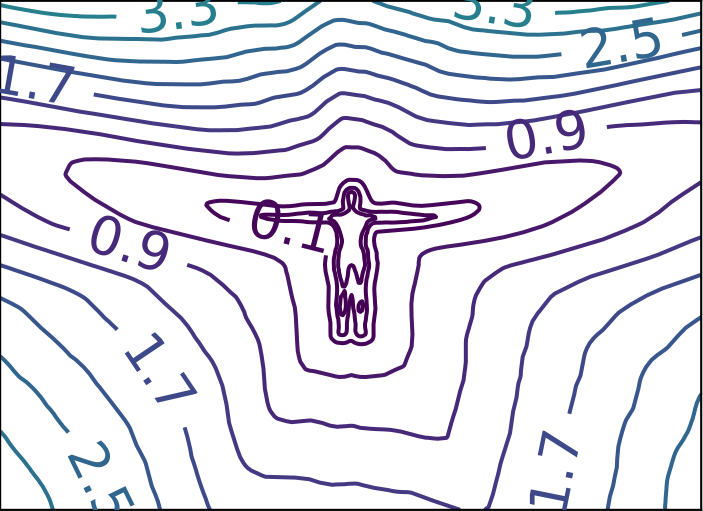
Human Robot Interaction
Distance Field:
$\;\frac{1}{3}
\vd_{\mathrm{human,robot}} - 0.25$
Human Robot Interaction
Distance Field:
$\;\frac{1}{3} \vd_{\mathrm{human,robot}} - 0.25$
Take Home Message
Regularized Deep
Signed Distance Fields Provides A Smooth,
Fine-Grained Distance Function at Any Scale for Articulated Objects
![]()